前言
記錄CS2000設備使用串口連接以及相關控制。
CS2000是一臺分光輻射亮度計,也就是可以測量光源的亮度。詳細的規格網址參考CS2000/CS-2000A ,所有信息以柯尼卡美能達官網的參數以及使用手冊為主。
使用目的及環境
當前的使用目的是使用PC端控制CS2000,測量屏幕的亮度數據。
PC端使用Python,在Win10環境下開發;
需要額外安裝的模塊:pySerial;
設備連接方法
這臺設備是支持USB1.1 Full-Speed和RS-232C的。其配套的軟件CS-S10是使用的USB1.1接口,如果安裝了軟件,也就相當于安裝了對應驅動。當然,我這里則是使用了配置串行通訊端口COM Port(Cluster Communication Port)。
CS2000支持的通訊設定如下:
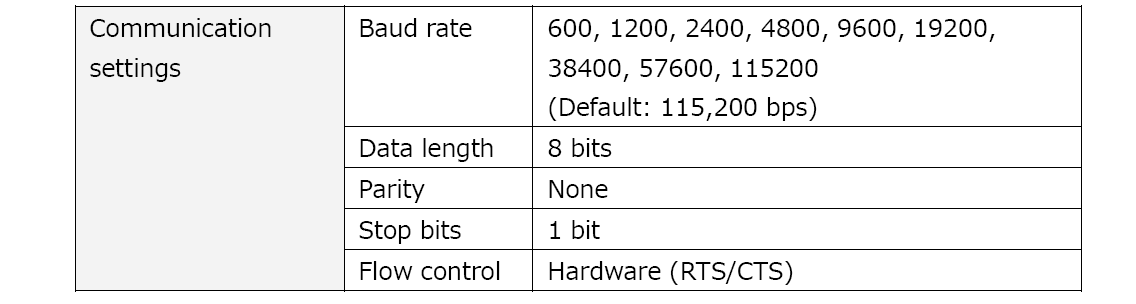
這里選用波特率115200,數據長度8 bits, 無校驗,1 bit停止位的設定;至于Hardware(RTS/CTS),即Require To Send和Clear To Send信號,這里先不做考慮。
程序主體流程
1.獲取電腦COM列表;
2.連接并打開CS2000的設備端口;
3.設備初始化(設定控制模式,關閉測試按鍵操作,設定同步模式等);
4.單次測量并獲取測量值;
5.關閉串口;
接下來就開始結合手冊進行操作。
獲取端口
需要引入serial.tools.list_ports模塊:
def port_list():
"""
獲取電腦端口列表
:return: 端口列表
"""
pl = serial.tools.list_ports.comports()
# print(pl)
print("Port List:")
for item in pl:
print("{}\t\t:\t{}".format(item.usb_description(), item.manufacturer))
獲取端口列表后,可以打印端口的描述和制造商,用于區分多個端口。
連接端口
需要引入serial模塊:
def connect_com(port, baudrate=115200, timeout=0):
"""
配置串口參數并進行連接;
:param port: 端口號,“COM1”
:param baudrate: 波特率,115200
:param timeout: 超時時間,0
:return: 連接好的串口,ser
"""
# noinspection PyBroadException
try:
ser = serial.Serial(port, baudrate, timeout=timeout)
print("Port\t\t:\t{}".format(ser.name))
print("Baudrate\t:\t{}".format(ser.baudrate))
print("Status\t\t:\t{} Connect Successful!".format(port))
return ser
except Exception:
print("Status\t\t:\t\t\tConnect COM Failed!")
定義的函數,返回打開串口之后的對象。
發送格式
分隔符
使用PC發送命令到測量設備的時候,需要使用如下分隔符:
CR, LF對應的ASCII的0x0D和0x0A;也就是在命令結束后要加分隔符進行分割;
數據字符格式
發送的數據中,數字發送,必須要跟數字的字符一樣。比如發送十進制數據886,就需要發送對應的字符886。如果需要輸入的字符長度少,需要用空格補齊。
超時
PC通信的超時設定至少要10s。這里可以理解為設備測量亮度是需要積分時間的,比如說測試比較暗的畫面,需要長時間的積分,因此測量的返回數據需要對應延遲很長時間,因此超時設定為至少10s。
實際使用的情況中,比較暗的畫面可能需要超過7s的測量時間。
初始化
初始化包含以下以幾個環節,包括設置遠端模式(SCMS),關閉測量按鍵(MSWE),設定同步模式(SCMS)等;這里仔細參考手冊,很容易就能理解,下面就直接貼出代碼。
def remote_mode(ser):
"""
對cs2000進行遠程控制設置
:param ser: cs2000的串口
:return: None
"""
data = b'RMTS,1\n'
tx_data(ser, data)
if rx_data(ser)[0] == "OK00":
print("Status\t\t:\tRemote Mode Setting OK!")
else:
print("Status\t\t:\tRemote Mode Setting ERROR!")
def meas_key_off(ser):
"""
關閉cs2000設備上的measure按鍵控制
:param ser: cs2000的串口
:return: None
"""
data = b'MSWE,0\n'
tx_data(ser, data)
if rx_data(ser)[0] == "OK00":
# print("Status\t\t:\tMeasure Key Disable OK!")
pass
else:
print("Status\t\t:\tMeasure Key Disable ERROR!")
def sync_mode_set(ser, freq):
"""
同步模式設定
:param ser: cs2000的串口
:param freq: 頻率,單位Hz
:return: None
"""
mode = b'1,'
freq = freq.encode()
data = b'SCMS,' + mode + freq + b'00\n'
tx_data(ser, data)
if rx_data(ser)[0] == "OK00":
print("Status\t\t:\tSync Mode is {}, freq is {}Hz!".format(mode, freq))
pass
else:
print("Status\t\t:\tMeasure Key Disable ERROR!")
def sync_mode_read(ser):
"""
同步模式讀取
:param ser: cs2000的串口
:return: None
"""
sync_mode_dict = {"0": "No sync",
"1": "Internal sync",
"2": "External sync"}
data = b'SCMR\n'
tx_data(ser, data)
rdata = rx_data(ser)
if rdata[0] == "OK00":
print("Status\t\t:\tSync Mode is {}. ".format(sync_mode_dict[rdata[1]]))
if rdata[1] == "1":
print("Status\t\t:\tSync frequency is {}Hz. ".format(rdata[2][:-2]))
pass
else:
print("Status\t\t:\tSync Mode read ERROR!")
def dev_init(ser):
"""
cs2000設備進行初始化,包含設置為遠程控制,關閉測量按鍵,設置同步模式,查詢同步模式數據
:param ser: cs2000的串口
:return: None
"""
remote_mode(ser)
meas_key_off(ser)
sync_mode_set(ser, SYNC_FREQ)
sync_mode_read(ser)
注意:這里每次發送命令之后,設備均會返回數據。如若返回的是OK00,則說明命令發送和接收都沒有出現問題,如果返回的指令有ERxx等字樣,需要根據手冊中的錯誤代碼列表查詢錯誤原因,并進行改正。
測量數據
測量數據需要先發送測量指令,等待返回測量時間,等待測量結束;
再發送測量數據讀取指令。
def measure(ser):
"""
向cs2000發出測量的命令
:param ser: cs2000的串口
:return: None
"""
data = b'MEAS,1\n'
tx_data(ser, data)
rdata = rx_data(ser)
if rdata[0] == "OK00":
# print("Status\t\t:\tMeasure time is {}s".format(rdata[1]))
pass
else:
print("Status\t\t:\tMeasure CMD ERROR Code {}".format(rdata[0]))
rdata_1 = rx_data(ser)
if rdata_1[0] == "OK00":
# print("Status\t\t:\tMeasurement completed!")
pass
else:
print("Status\t\t:\tMeasure Wait ERROR Code {}".format(rdata_1[0]))
def lv_read(ser):
"""
向cs2000發出測量的命令
:param ser: cs2000的串口
:return: 亮度值lv
"""
data = b'MEDR,2,0,101\n'
tx_data(ser, data)
rdata = rx_data(ser)
if rdata[0] == "OK00":
# print("Status\t\t:\tLuminance is {} cd/m²".format(rdata[1]))
return rdata[1]
else:
print("Status\t\t:\tLuminance Read ERROR Code {}".format(rdata[0]))
return None
def get_lv(ser):
"""
獲取亮度值
:param ser: cs2000的串口
:return: 亮度值,單位cd/m²
"""
measure(ser)
return lv_read(ser)
def xylv_read(ser):
"""
向cs2000發出測量的命令
:param ser: cs2000的串口
:return: 色坐標,X,Y,亮度,LV
"""
data = b'MEDR,2,0,2\n'
tx_data(ser, data)
rdata = rx_data(ser)
if rdata[0] == "OK00":
print("Status\t\t:\tX,Y,LV are {} {} {}".format(rdata[1], rdata[2], rdata[3]))
return rdata[1:]
else:
print("Status\t\t:\tMeasure ERROR!")
return None
def get_xylv(ser):
"""
獲取色坐標X,Y和亮度LV。
:param ser: cs2000的串口
:return: 色坐標,X,Y,亮度,LV
"""
measure(ser)
return xylv_read(ser)
其中,返回數據的格式需要根據發送的指令進行解析,對應在Datasheet中也有介紹。
串口收發數據的函數
對于串口收發數據,也封裝了一層函數,方便調用:
def tx_data(ser, data):
# noinspection PyBroadException
try:
ser.write(data)
# print("Status\t\t:\tSend OK!")
except Exception:
print("Status\t\t:\tSend ERROR!")
def rx_data(ser):
# noinspection PyBroadException
try:
rdata = ser.readline().decode("utf-8").replace("\n", "").split(",")
# print("Status\t\t:\tReceived {}".format(rdata))
return rdata
except Exception:
print("Status\t\t:\tReceive ERROR!")
串口關閉
串口使用之后一定要進行合理的關閉,防止多個程序運行,出現連接問題。
def serial_close(ser):
"""
關閉串口連接
:return: None
"""
# noinspection PyBroadException
try:
ser.close()
print("Port {} has been closed!".format(ser.name))
except Exception:
print("----serial_close failed!")
主函數
所有的參數傳遞,都是將產生的串口對象作為參數傳遞。
if __name__ == '__main__':
port_list()
cs2000 = connect_com("COM1", timeout=5)
dev_init(cs2000)
get_lv(cs2000)
get_xylv(cs2000)
serial_close(cs2000)
寫在后面
設備調試的要義在于,一切操作要參考Datasheet:cs_2000_technicalnote_en,可以在官網支持中下載到。熟悉了手冊之后,后面的調試環節可以節省很多時間,調制的過程也會非常順利。這里例舉幾個調試過程中遇到的問題:
1.合理設定超時(要根據最長的測量時間設定),在發送數據之后就可以等待接收數據;
2.這里的分隔符使用的就是\n,轉換為byte類型后進行串口發送;
3.一些模式設定可以只進行一次設定,不需要每次上電都進行設定,為保險起見,統一放在初始化里面;
4.暗光環境下測試暗光源,需要的時間會很長,手動測試版有24s之多,亮光源的測試時間在1s一次左右;
5.程序中將串口直接作為參數傳遞有些不妥,可以將該模塊改為class;
后面如果遇到了其他問題也會在此更新。
本項目源碼地址:https://github.com/LJacki/CS2000
到此這篇關于總結Python連接CS2000的詳細步驟的文章就介紹到這了,更多相關python連接CS2000內容請搜索腳本之家以前的文章或繼續瀏覽下面的相關文章希望大家以后多多支持腳本之家!
您可能感興趣的文章:- Python連接HDFS實現文件上傳下載及Pandas轉換文本文件到CSV操作
- Python3操作讀寫CSV文件使用包過程解析
- python給指定csv表格中的聯系人群發郵件(帶附件的郵件)
- Python csv文件的讀寫操作實例詳解